Microsoft word - neuro-fuzzy_measurement_2014_v5_revision.doc
Viharos, Zs. J.; Kis K. B.: Survey on Neuro-Fuzzy Systems and their Applications in TechnicalDiagnostics and Measurement, Measurement, Vol. 67., 2015., pp. 126-136., (doi: http:// dx.doi.org/10.1016/j.measurement.2015.02.001), SCI, Impact Factor: 1.526.
Survey on Neuro-Fuzzy Systems and their Applications in Technical Diagnostics and
Measurement
Dr. Zs. J. Viharos*, K. B. Kis The Computer and Automation Research Institute, Hungarian Academy of Sciences, Budapest, H-1111 Hungary
Tel.: +36 1 279 6 195, E-mail address: {viharos.zsolt*, kis.krisztian}@sztaki.mta.hu
A b s t r a c t
Both fuzzy logic, as the basis of many inference systems, and Neural Networks, as a powerful computational
model for classification and estimation, have been used in many application fields since their birth. These two
techniques are somewhat supplementary to each other in a way that what one is lacking of the other can provide.
This led to the creation of Neuro-Fuzzy systems which utilize fuzzy logic to construct a complex model by
extending the capabilities of Artificial Neural Networks. Generally speaking all type of systems that integrate
these two techniques can be called Neuro-Fuzzy systems. Key feature of these systems is that they use input-
output patterns to adjust the fuzzy sets and rules inside the model. The paper reviews the principles of a Neuro-
Fuzzy system and the key methods presented in this field, furthermore provides survey on their applications for
technical diagnostics and measurement.
Keywords: Technical diagnostics, Neuro-Fuzzy systems, Measurement
1. Introduction
2. Application of Neuro-Fuzzy Systems to
Technical Diagnostics and Measurement
As two important techniques of artificial intelligence, Fuzzy Systems (FS) and Artificial This section gives a survey on Neuro-Fuzzy system Neural Networks (ANNs) have many applications applications in the field of technical diagnostics and in various fields such as production, control measurement. Different Neuro-Fuzzy architectures systems, diagnostic, supervision, etc. They evolved are named here, their history and a more detailed and improved throughout the years to adapt arising description are presented in the next sections. At needs and technological advancements. As ANNs the end of this section a table is also presented and Fuzzy Systems had been often applied together which gives a comprehensive overview of these the concept of a fusion between them started to take applications and their fields categorically. shape. Neuro-Fuzzy systems were born which utilize the advantages of both techniques: they have learning and generalization capabilities and at the same time they reveal the functionality stored in the In the early 90s Neuro-Fuzzy was still a new model. To reach this behaviour they are able to concept to be shaped by different implementations learn and tune their parameters based on input- and applications. In these years a relatively small output patterns (learning phase) and then they work amount of Neuro-Fuzzy application was published like a fuzzy logic system (execution phase), too. and naturally these were unique approaches rather These combined features make this type of systems than utilisation of existing solutions. For example useful when solving complex problems also for among the pioneers, Ayoubi presented a structure technical diagnostic and measurement assignments. that models the fuzzy inference mechanism based The paper contains seven sections. After the on neural units [1]. He tested the system on two introduction the second section presents Neuro- real-world problems: monitoring the state of a Fuzzy applications of the last two decades in turbocharger and supervision of air pressure in technical diagnostics and measurement. The third vehicle wheels. The implemented model proved to section describes the two main components of a be efficient when the problem space is low- Neuro-Fuzzy system followed by the forth one dimensional; however, when it had significantly reviewing the progression of the Neuro-Fuzzy more dimensions, Multi-Layer Perceptron (MLP) systems and the modern solutions used today. The performed far better than the fuzzy inference last three sections are conclusions, acknowledgments and references. Zhang and Morris also used a Neuro-Fuzzy solution for fault diagnosis of continuous stirred tank reactor process [2]. The chosen test problem is well known about its highly nonlinear dynamics which is a One of the first and probably most widespread result of the phenomenon that process gain changes Neuro-Fuzzy architecture is the Adaptive-Network- drastically with any operating condition based Fuzzy Inference System (ANFIS) which has modification. The network applied for this problem similar accuracy as the Multi-Layer Perceptron consists of 4 layers: an input layer, a fuzzification (MLP) which makes it ideal for function layer, a hidden layer and an output layer. The input approximation. This architecture was used for layer has 14 neurons, because the system has 14 mechanical fault diagnostics of induction motors measured signal values, the fuzzification layer has 3 with variable speed drives by Sadeghian and Wu neurons for each input neuron, because each input [7]. The authors managed to significantly reduce information is ordered to 3 individual fuzzy the system complexity and learning duration of the membership function, the hidden layer has 10 network by using multiple ANFIS units in their neurons representing 10 fuzzy rules and the output layer has 11 neurons, each corresponding to a particular fault. They achieved much better performance than with a conventional feed forward neural network while the system also provided a more interpretable structure. 2.2. 2000s Neuro-Fuzzy systems became more widespread in the 2000s especially in technical diagnostics and measurement. For example Sakuntala Mahapatra et Fig. 1. Multiple ANFIS units for multiple fault
al. built such systems for adaptive filtering of oscillatory signals [3]. The used model proved to be more efficient than other alternative fuzzy adaptive Fig. 1. shows the multiple ANFIS units where each systems; moreover, it can be used for on-line one is responsible for detecting a specific fault type monitoring of signals, independently whether they as these fault types have different feature are described by linguistic variables or crisp coefficients. This modular structure provides an easy way to make extensions for detecting other Frey et al. used a Neuro-Fuzzy model to control a fault types and also has the advantage that the units rotary hammer drill [4]. For solving this problem can be easily trained due to their simplicity. In the authors had to find the optimal settings of another application Lei et al. used multiple ANFIS rotational speed and strike rate to achieve optimal combination with genetic algorithm for fault drill penetration. A self-learning Neuro-Fuzzy diagnostics of rotating machinery [8]. They model was developed to intelligently control these implemented a classifier system where the features two variables during the drilling process to achieve describing the problem were divided into six optimal performance. predetermined and separated groups and individual Detecting the onset of damage in gear systems was Neuro-Fuzzy classifiers were constructed for each the goal of Wang et al., for which they developed a group. The final classification result of the system Neuro-Fuzzy based diagnostic system [5]. The is the weighted average of the individual groups. diagnosis of the gear system is conducted gear-by- During training, genetic algorithm was applied for gear, which means that for every gear there is a optimising these weights. This method can yield separated Neuro-Fuzzy model. Each model has better classification result than the member three inputs and one output: the inputs are reference classifiers individually. functions that reduce the feature dimensions, i.e. Amaral et al. applied a diagnostic technique based they aggregate multiple features of the real system on the identification of a specified current pattern to one variable; the output is the condition of the for detection of motor stator fault and used a Neuro- gear, which can be normal or damaged. To train the Fuzzy model for an image feature extraction based implemented model they proposed a constrained- identification [9]. They used the Neuro-Fuzzy gradient-reliability algorithm which can effectively strategy to get a better linguistic knowledge about update the membership function parameters and set the underlying fault detection and diagnosis the rule weights. Evsukoff and Gentil created a recurrent Neuro- Machinery malfunctions often reduce productivity Fuzzy system for fault detection and isolation in and increase maintenance costs in various industrial nuclear reactors [6]. In their model a fuzzification fields. Zio and Gole proposed a Neuro-Fuzzy module is linked to a neural network based approach to solve fault diagnosis of rotating inference module which was adapted to recognize machinery by pattern classification while obtaining related faults based on the process variables. a model which remained easily interpretable [10].
Particle Swarm Optimization (PSO) to improve the model's learning capability. Via this solution, they showed that PSO can be effectively employed for developing industrial model-based control schemes. 2.3. Nowadays Nowadays the emphasis of the research of Neuro-Fuzzy systems is concentrating mainly on their applications on wide practical fields. For instance Guzinski et al. presented a diagnostic system for shaft misalignment detection based on the ANFIS model [13]. They used this system in an adjustable
speed sensorless induction motor drive where the
Fig. 2. A sketch of a bearing assembly [10]
model is based on the analysis of the stator current,
motor speed and load torque processing. The results
Fig. 2. shows components of a bearing assembly
showed that it can effectively indicate the shaft
which can be damaged leading to malfunction. For
misalignment. Karimi and Salahshoor also used the
the diagnosis of these components the authors
ANFIS model and combined it with Principal
created a Neuro-Fuzzy algorithm which consists of
Component Analysis (PCA) for fault detection and
multiple modules. First, an initial set of fuzzy rules
diagnosis of distillation column [14]. They used
are determined, where the initial large number of
PCA to extract the most informative features and at
rules is reduced with a heuristic solution based on
the same time reduce dimensionality of the
the firing strength of each rule. Then the forward
measured data then fed the reduced data to ANFIS
algorithm calculates the relative strengths of the
to discriminate the occurred fault. They
rules and the next module uses these values for
demonstrated the effectiveness of the proposed
creating new rules if necessary. The optimisation
method via extensive conducted tests in a
module tunes the parameters of the member
distillation column benchmark.
functions and finally, a pruning is applied to reduce
Wali et al. compared intelligent controllers such as
the size of the rule set. After the initial set of rules
Fuzzy and Neuro-Fuzzy in the task of monitoring
has been established, the algorithm repeats itself
and control of novel advanced microwave biodiesel
iteratively until the desired accuracy is reached.
Chen, Roberts and Weston used Neuro-Fuzzy
Systems for fault detection and diagnostics of railway track circuits [11].
Fig. 3. Scheme of neuro-fuzzy for fault detection
and diagnosis [11]
Fig. 4. The basic block diagram for fuzzy controller
Fig. 3. Shows the scheme of the implemented
model where the measurement data associated with
different operating conditions is mapped to each
Fig. 4. shows the block diagram of the fuzzy
failure mode. In their solution, they use a
controller which was applied for temperature
generalized version of the ANFIS to support
control inside the reactor. The authors found that
multiple outputs. Each one of the eleven outputs
the ANFIS controller is more robust to parameter
corresponds to a condition (1 healthy and 10 faulty
variations while a pure fuzzy solution is able to
condition) while eight current and voltage
regulate in minimal overshoot. ANFIS model was
measurements are used as the input variables.
used by Eristi for fault diagnosis of series
Another research was aiming at Neuro-Fuzzy based
compensated transmission lines, too [16].
state modelling of a flexible robotic arm using real sensor data [12]. The authors also utilized improved
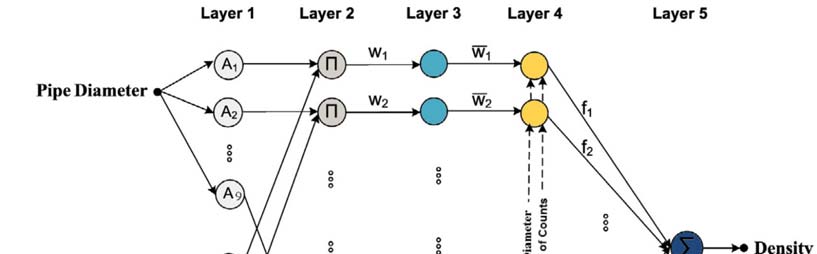
Fig. 5. Main structure of the proposed algorithm for fault diagnosis, classification and location isolation [16]
Fig. 5. shows the structure of the algorithm where
the clustering based fuzzy inference system and the
Vabc denotes the Voltage signal and Iabc denotes the
ANN method and concluded that it is due to the fact
Current signal. Eristi utilized Wavelet
that ANFIS inherits the advantages of both of the
Transformation (WT) and Norm entropy to achieve
effective feature extraction of the fault signals. To
One of the major factors in catalytic performance is
test the proposed method an extensive data set of
the size of the catalyst. In the next application the
23 436 fault cases were used and the results showed
authors used response surface methodology and the
that the algorithm is effective and robust to
ANFIS model to quantify the effects of physical
parameter variations.
characteristics of magnetite on Fenton-like
Concentration estimation of volatile organic
oxidation efficiency of methylene blue [18]. For
compounds was the goal of Jha et al. [17]. They
petroleum products monitoring Roshani et al.
built multiple models to measure and compare their
applied the ANFIS model to predict fluid density
performance on the problem. They found that the
for a gamma ray densitometer [19].
Neuro-Fuzzy system (ANFIS) outperformed both
Fig. 6. The proposed ANFIS structure to predict fluid density for a gamma ray densitometer [19]
Fig. 6. shows the proposed model where A1-A9
the output values of the corresponding nodes. The
denotes the membership functions of the pipe
authors simulated the operation of the densitometer
diameter variable and B1-B9 denotes the
device to obtain the testing dataset and after
membership functions of the number of counts (per
application of the model they concluded that it can
photon) variable. W1-W9, W1-W9 and f1-f9 denotes
estimate the fluid density with high accuracy.
In many cases very different application fields are
Fig. 8. shows a typical artificial accelerogram from
targeted by Neuro-Fuzzy solutions as in the case of
which the 20 parameters were extracted. The
another ANFIS model which was used to detect
proposed models were able to produce 98%
alterations in sleep EEG activity during hypopnoea
recognition rate and thus their application can be
episodes by Übeyli et al. [20]. The authors used the
tested in real circumstances.
ANFIS for classification and they performed
Benyamin Khoshnevisan et al. adopted an ANFIS
feature extraction by computing of wavelet
and an ANN based system to predict potato yield
coefficients. In their case four models was used:
from energy inputs [23]. The purpose of the study
three were fed directly by measured data on the
was to create model which helps farmers to
electrodes and the fourth had the purpose of
estimate the level of production in advance and
improving diagnostic accuracy by gaining its inputs
make an appropriate plan for the future. The authors
from the outputs of the other three systems. Lee and
evaluated various topologies to find the optimal
Lim also used hybrid fuzzy neural methods to
one; moreover they compared the ANN and ANFIS
compare Deep Brain Stimulation (DBS) and
models and found that the latter one is more capable
levodopa as two treatments of Parkinsonian resting
of overcoming the problem of inconsistent data
because of its rule based architecture.
Another application aimed at prediction of vertical stress transmission in real soil profile using ANFIS [24]. The authors built multiple models with different membership function types and for this specific dataset the gauss membership function proved to be the most efficient. Moharana et al. also used the ANFIS model to estimate the roughness coefficients of a meandering channel [25]. This is a
complex problem because the coefficients depend
Fig. 7. Velocity laser recording of resting tremor
on many hydraulic, geometric and roughness
parameters. They compared the result with earlier
studies and concluded that the Neuro-Fuzzy model
Fig. 7. shows a method for recording resting
is more effective than others in terms of estimation
tremors which was applied to 16 subjects to build a
dataset. The study not only showed that DBS is
There is a wide variety of other applications where
more effective than levodopa but it did it in a way
this kind of systems was successfully implemented
that is less time-consuming and less expensive than
from the fields of biology and environment to fault
MRI and other medical expert dependant solutions.
detection and diagnostics as by Kar et al. [26].
In another case ANN and Neuro-Fuzzy based
models were applied to classify earthquake
Neuro-Fuzzy applications are widely used for
damages in buildings which can be utilized to help
technical diagnosis and measurement purposes;
engineers decide whether some structures are
however, neural and fuzzy methods are often used
remained safe or not [22]. The presented
individually, too. For instance Bilski used an
classification models used 20 seismic parameters of
artificial intelligence-based model for diagnostics of
accelerograms to estimate 4 damage categories.
analog systems [27]. He preprocessed the training
and testing data sets using statistical methods to minimize the amount of information to be measured in order to optimize the performance of the Artificial Neural Network (ANN) diagnostic modules. In another application Catelani and Ciani analysed the problem of disturbance induced by high energy particles on electronic devices and developed a model to determine whether a system respond to specific requirements [28]. 2.4. Overview of Neuro-Fuzzy System applications to Technical Diagnostics and Measurement Table 1 gives a comprehensive structure to all
overviewed applications appointing the main
Fig. 8. Artificial seismic accelerogram processed to
functionalities and application fields and the related
classify earthquake damages in buildings [22]
Table 1
Applications functionalities, with their fields and related publications
Application field
Authors and Reference
Turbocharger state, air pressure of vehicle wheels
Monitoring and
Fenton-like oxidation efficiency
Pouran et al. [18]
supervision
fluid density for a gamma ray densitometer
Roshani et al. [19]
Analogue systems
Continuous stirred tank reactor process
Zhang and Morris [2]
Nuclear reactors
Evsukoff and Gentil [6]
Induction motors
Guzinski et al. [13]
Fault diagnosis
Rotating machinery
Zio and Gole [10]
Railway track circuits
Chen et al. [11]
Distillation column
Karimi and Salahshoor [14]
Series compensated transmission lines
Disturbance induced by high energy particles
Catelani and Ciani [28]
Adaptive filtering
Oscillatory signal
Sakuntala Mahapatra et al. [3]
Rotary hammer drill
Microwave biodiesel reactors
Wali et al. [15]
Pattern identification
Amaral et al. [9]
System state modelling
Flexible robotic arm
Amitava et al. [12]
Volatile organic compounds
Khoshnevisan et al. [23]
Variable estimation
Hamid Taghavifar et al. [24]
Meandering channel
Moharana et al. [25]
Variable change
Sleep EEG activity during hypopnoea episodes
Übeyli et al. [20]
detection
Parkinsonian resting tremors
Lee and Lim [21]
Damage classification
Earthquake damages in buildings
Alvanitopoulos et al. [22]
inspired by the behaviour of biological neural
3. Prelude of Neuro-Fuzzy Systems
networks inside the human brain. An ANN
implements the functionality of the biological
This section discusses the techniques that provided
neural networks by building up a network of
the theoretical basis and allowed the concept of
autonomous computational units (neurons) and
Neuro-Fuzzy system to be formed. These
connecting them via weighted links defined by the
techniques are the Neural Networks and the Fuzzy
first pioneers W. S. McCulloch and W. Pitts [29].
Systems which will be presented in the following
Such a computational unit e.g. an artificial neuron
is shown on Fig. 9. It consists of input links (special
neurons sometimes don't have any input links), a
3.1. Artificial Neural Networks (ANNs)
transfer function, an activation function and an
optional memory component while the weighted links between them are represented by real numbers. In Fig. 9. x1-xn denotes the input values of the neuron, oj denotes the output value and w1j-wnj denotes the weights of the input links. The transfer function aggregate the outputs of the other neurons connected via the input links weighted with the strength of the links. The activation function produces the output value based on the output of the transfer function and the memory serves as a
container to store previous states of the neuron (in
Fig. 9. An artificial neuron
many cases it is not used or only a part of the state
is stored). When a neuron fires the signal
The concept of the ANN was established seven
propagates through the output links to the
decades ago and, as the name suggests, it was
connected neurons and the weight of a link
(represented by a real number) determines the
strength of the connection and weakens the signal
Yet another class of ANNs is the Radial Basis
Function Network (RBFN) which uses radial basis
In 1957 Frank Rosenblatt created the perceptron
functions as the activation function of the neurons
algorithm for supervised classification of an input
[33]. Their training algorithms are extended to
into one of two possible outputs [30]. This is a type
adjust not only the network's weights but the
of linear classifier and at the time, only the single-
activation function parameters, too. They have
layer perceptron could be trained.
many uses such as function approximation, time
18 years later Werbos created the backpropagation
series prediction, classification, etc.
algorithm for training the MLP [31].
Over the decades ANNs proved to be powerful computational models for solving complex estimation and classification problems as they are robust and are capable of high level generalization, moreover they can already handle incomplete data, too [34]. However no information can be extracted from a trained ANN about the connections between the parameters, e.g. a generic ANN model can only approximate the output parameters but cannot tell what kind of connections exist between the input and output parameters. This is a key disadvantage
of the Neural Network model which led to the
Fig. 10. The MuliLayer Perceptron model
creation of Neuro-Fuzzy Systems.
Fig. 10. shows an MLP model where the neurons
3.2. Fuzzy Systems
are organized into layers and each layer is fully
connected with the next one. Supervised training of
Real life problems often have the tendency to be not
an MLP means repeated adjustment of the weight
discrete but continuous in nature. A somewhat
of each link to receive more and more favourable
special case of this phenomenon is to categorize
output on specific neurons (output neurons) while
objects or theoretical entities because in many
stimulating other neurons (input neurons). The
cases, categories don't have precisely defined
backpropagation algorithm achieves this by
criteria of membership. To solve this problem Lofti
calculating the derivatives of the network's error
Zadeh [35] introduced fuzzy set theory, where the
with respect to all of its weights and adjusting the
membership of an element is no longer a binary
weights to a position where, based on the
state but a continuous value e.g. instead of saying
derivatives, the error is smaller e.g. moving the
that a is an element of A set and not element of B,
weights in the direction of the descent of the
we can say that a is an element of A fuzzy set by
derivatives where the error is a measure of the
0.67 degree and element of B by 0.23 degree.
difference between the network's output and the
Fuzzy logic is a type of logic that uses fuzzy sets to
target values for the same input.
represent truth values and consequently it provides
After 1975 the MLP became more popular and
an effective way to represent human knowledge in a
widespread and during the years many other, but
mathematical language. Fuzzy logic uses fuzzy
not so highly popular ANN model types were
inference rules which are able to process the
defined, moreover, currently the basic research in
continuous truth values and produce an also
the field of neural networks is emphasising on the
continuous output. Each rule has the form of
study of biological neural systems and define new
learning algorithms and architectures that are maps
if <premise> then <consequent>,
of the biological brain systems. One of these new
types is the Self-Organizing Map (SOM) which can
that uses linguistics variables with symbolic terms.
be trained by unsupervised learning to produce a
Each term represents a fuzzy set. The terms of the
low dimensional representation of the input space
input space (typically 5-7 for each linguistic
[32]. They are mainly used for visualizing high
variable) compose the fuzzy partition. The fuzzy
dimensional data in low dimensional views.
inference mechanism consists of three stages: in the
Another type is the Recurrent Neural Network
first stage, the values of the numerical inputs are
(RNN), they are different from the common
mapped by a function according to a degree of
feedforward networks as they allow circles in their
compatibility of the respective fuzzy sets; this
structure e.g. some links propagate the signal back
operation can be called fuzzification. In the second
to such neurons that sent the original signal. This
stage, the fuzzy system processes the rules in
feature allows them to establish an internal memory
accordance with the firing strengths of the inputs.
which can be used to process arbitrary sequences of
In the third stage, the resultant fuzzy values are
transformed again into numerical values; this
architecture is called ANFIS and it uses the Takagi-
operation can be called defuzzification. Essentially,
Sugeno-Kang inference system.
this procedure makes possible the use fuzzy
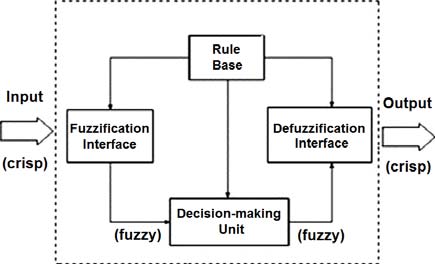
categories in representation of words and abstracts ideas of the human beings in the description of the decision taking procedure [36]. Fuzzy inference systems have two main type based on the mathematical calculation of the inference. These are the Mamdani type inference [37] and the Takagi-Sugeno-Kang (TSK) type inference [38]. A Mamdani type fuzzy rule can be described as
if A is X1 and B is X2 then C is X3,
where A, B, C are variables and X
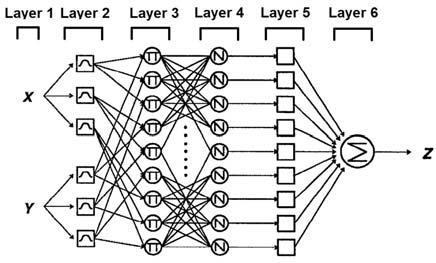
Fig. 11. The ANFIS architecture [39] where x and y
fuzzy sets. In contrast to the Mamdani type, a TSK
denote the input variables and z denotes the output
rule has the form of
if A is X
Fig. 11. shows the ANFIS architecture consisting of
1 and B is X2 then C = aA + bB + c,
six layers. The first layer contains two nodes for
where a, b and c are constants. As a result of the
input x and y, the second layer is responsible for
form of the rules the Mamdani type inference
mapping input values to the membership functions.
systems are more interpretable because both the
The nodes of the third layer correspond to the fuzzy
premises and consequents of the rules are fuzzy sets
rules in the form of production functions; their
while the Takagi-Sugeno-Kang types are more
output values are the firing strengths of each rule
accurate and computationally efficient, e.g. they
while the nodes in the fourth layer calculate the
build up more accurate models, however, here, only
ratio to the sum of all rules' firing strengths.
the premises of the rules are fuzzy sets.
Defuzzification happens in the fifth layer and the
All in all, Fuzzy Systems have the advantage that
sixth layer's output nodes sum their input values.
the fuzzy rules, which store the information, are
Iterative learning of ANFIS is composed of two
easily interpretable. Furthermore they provide a
stages. In the first stage the parameters of the
simple interface for extending the system with new
consequent functions (in the fifth layer) are tuned
information (by adding new rules) or manipulating
via a least mean square method. During the second
the existing rules. The problem with Fuzzy Systems
stage the parameters of the premise functions (in
lies in the fact that they completely depend on the
the second layer) are adjusted by a backpropagation
experts who design them. It only uses the
algorithm. These two stages are repeated iteratively
information which were encoded in the system and
for training of the system. It is also worth to
cannot learn on its own and it is incapable of
mention that this model has the best estimation
generalization. The described nature of Fuzzy
accuracy based on various benchmarking and
Systems indicates that a fusion with ANNs may
application results.
possibly lead to a new powerful computational
4.2. FALCON Architecture
4. Neuro-Fuzzy System Architectures
Approximately in the same time as ANFIS, the
Fuzzy Adaptive Learning Control Network
The previous section briefly described the concept
(FALCON) architecture was introduced, which is a
of the two main components building up a Neuro-
system with five layers and uses Mamdani type
Fuzzy system individually, so in this section the
different architectures can be discussed to show
Fig. 12. shows the FALCON architecture. Input
how different approaches managed to combine
nodes are located in the first layer; second layer has
ANNs with Fuzzy Systems. At the end of this
term nodes which represent the membership
section a table is also presented summarizing the
functions for the input values. Each node of the
advantages and drawbacks of each presented
third layer acts as a fuzzy rule. The fourth layer also
consists of term nodes; these represent the
membership functions for the outputs. Finally the
4.1. ANFIS Architecture
fifth layer is the output layer; here for every output
there are two nodes: one is for training data which
One of the first Neuro-Fuzzy Systems was
is the desired output and the other is for decision
introduced by Jang in year 1993 [39][40]. This
signal which is the actual output.
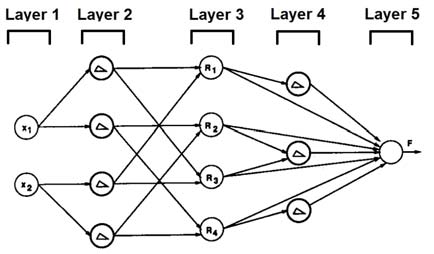
Fig. 13. shows the ASN component. The ASN is a five layer network which is responsible for selecting an action based on the current state of the system using fuzzy inference. Input nodes are in the first layer and the second one holds the membership functions. Each node in the third layer represents a fuzzy rule and nodes of the forth layer correspond to consequent labels, e.g. if a consequent label is in a rule then there is a link between the label's node and the rule's node. The fifth layer's nodes calculate the real output values based on the rules' firing strength and the forth layer's outputs. The AEN component of this architecture is a simple feedforward network which predicts reinforcements based on the state variables of the system. And the SAM component stochastically generates an action from based on the recommendation of the AEN GARIC uses gradient descending and reinforcement learning to adjust its internal parameters. 4.4. NEFCON Architecture
In parallel with the models mentioned earlier, the
Fig. 12. The FALCON architecture
Neural Fuzzy Controller (NEFCON) architecture
had been created, which has three layers and
Training is done by a two-phase-algorithm. The
implements a Mamdani type inference system [43].
first phase is responsible for finding the initial membership functions by a self-organized learning scheme. In the second phase the parameters of the membership functions are adjusted using supervised learning. During the training nodes and links can be deleted or merged reforming the structure of the network. 4.3. GARIC Architecture Another early Neuro-Fuzzy model is the Generalized Approximate Reasoning based Intelligence Control (GARIC) system, which is composed of three components: the Action Selection Network (ASN), the Action Evaluation
Fig. 14. The NEFCON architecture where x
Network (AEN) and the Stochastic Action Modifier
denote the input variables and c denotes the output
Fig. 14. Shows the NEFCON architecture where the circles indicate the nodes which are forming the layers and the rectangles indicate the shared weights of the network. The first layer consists of the input nodes, in the second layer the nodes represent the fuzzy rules and the third layer holds the output nodes. In this architecture the links connecting the nodes are weighted with fuzzy sets. The learning procedure uses reinforcement learning
with backpropagation algorithm to either learn the
Fig. 13. The ASN component of the GARIC
rule base from the beginning or to optimise an
architecture [42]
initially defined rule base. Two other systems were
developed based on NEFCON which are
specialized versions of the original architecture.
These systems are the NEFCLASS [44] which is
specialized in classification problems and the NEFPROX [45] which was created for function approximation. 4.5. SONFIN Architecture Self-Constructing Neural Fuzzy Inference Network (SONFIN) is a Takagi-Sugeno-Kang-type fuzzy rule-based model which consists of six layers [46].
Fig. 16. The dmEfuNN architecture
Fig. 16. shows the dmEfuNN architecture. The first layer contains the input nodes and membership functions are in the second layer. Fuzzy rules are represented by the nodes in the third layer. Fourth layer selects a number of rules from the third layer which are the closest to the fuzzy inputs and the fifth layer does the defuzzification and produces
Fig. 15. The SONFIN architecture [46] where x1
The dmEfuNN can optimize global generalization
and x2 denote the input variables, y1 denotes the
error and local generalization error in contrast to
output variable, R1-R3 denotes the rule nodes and x
MLP and ANFIS which can only optimize global
represents the input vector
error. As the name suggests the number of nodes
and links in the structure can dynamically increase
Fig. 15. shows the SONFIN architecture which, in
or decrease during the on-line learning while off-
fact, is similar to the ANFIS. Layer 1-4 and 6 are
line training uses a given structure and optimizes
functioning as they are in the ANFIS architecture.
internal parameters.
The fifth, consequent layer can hold two types of
nodes. The first type represents the fuzzy sets by membership functions while the second type is optional and gains its inputs from the first and fourth layer. Constructing of SONFIN happens concurrently by a structure and a parameter learning method. The structure learning identifies both the precondition and consequent parts of the rules by minimizing the number of rules and membership functions for the input and by optimally generating new membership functions for the output variables. Parameter learning uses LMS or RLS algorithms to adjust consequent parameters and backpropagation for precondition parameters. 4.6. dmEfuNN Architecture The Dynamic Evolving Fuzzy Neural Network (dmEfuNN) is a system with five layers which uses the Takagi-Sugeno fuzzy inference mechanism [47]. The predecessors of this model are FuNN [48] and EFuNN [49] which both uses the Mamdani
4.6. Comparison of the Neuro-Fuzzy architectures
overviewed Neuro-Fuzzy system types appointing
the main advantages and drawbacks of each
Table 2 gives a comprehensive comparison to all
Table 2
Advantages and drawbacks of the presented architectures.
Architecture
Advantages Drawbacks
As it implements a Takagi-Sugeno-
Cannot handle multiple output systems
Kang inference mechanism, it is a Only fully defined structures can be trained very accurate model (most accurate There is no dynamic rule creation or reduction among the presented architectures and more accurate than Multi-Layer Perceptron and pure Fuzzy systems)
It has a learning phase for building up Its Mamdani type inference makes it less
its initial structure (number of rules
accurate especially for parameter estimation
and membership functions can be determined via training)
Its Mamdani type inference makes it
more interpretable
It is one of the earliest presented Isn't a single model but consists of multiple
Neuro-Fuzzy system
It is able to reduce the number of Its Mamdani type inference makes it less
rules during its training
accurate especially for parameter estimation
Its Mamdani type inference makes it
more interpretable
There are no initial rules but rules are Not as accurate as the ANFIS (which has the
created and adapted as on-line
most similar structure to this)
learning proceeds via simultaneous structure and parameter identification
The number of generated rules and
membership functions is small even for modelling of a sophisticated system
During its on-line training it can Not as accurate as the ANFIS
increase or decrease the number of rules in the system
5. Conclusions
work differently in different parts of the parameter
space providing a more detailed and somehow
Different applications of Neuro-Fuzzy Systems
distributed model instead of a general solution.
were discussed to show their high potential in
The paper briefly reviewed the concept of Artificial
technical diagnostics and measurement. This survey
Neural Networks and Fuzzy Systems as
summarizes in a comprehensive overview the
computational models and how they inspired the
Neuro-Fuzzy applications in technical diagnostics
creation of Neuro-Fuzzy Systems. As it was
and measurement with appointing the generalized,
discussed this fusion can unite the generalization
main, typical functionalities and with highlighting
capabilities of Neural Networks with the easy
their great variety of application areas.
interpretability and high expressive power of fuzzy
These systems are successful because of their
rules in an effective way.
nature that they reveal the nature of the important
Six different architectures were presented and it can
interdependence between the parameters of the
be concluded that these are the most important ones
modelled system while they are, in fact, powerful
although there are other structure variations, too.
approximators. Their ability to discover
Usually each architecture organizes its nodes a
connections between parameter intervals can be
slightly different way and consequently they use
extremely useful when applying the model for
specific learning algorithms which are adapted to
diagnostic and control tasks because entirely
the different structures. The different Neuro-Fuzzy
different rules can be used to specific subsets of the
models were also compared and a table is also
problem, e.g. these systems have the capability to
presented summarizing the advantages and
drawbacks of each presented architecture.
ANFIS combination with GAs", Mechanical
All in all it can be said that ANFIS architecture is
Systems and Signal Processing, vol. 21: (5),
the most popular and widespread among the Neuro-
pp. 2280-2294, 2007.
Fuzzy systems for various applications in the field
[9] T. G. Amaral, V. F. Pires, J. F. Martins, A. J.
of diagnostics, control or for medical research, civil
Pires, M. M. Crisóstomo, "Image processing
engineering, etc. This is mainly because the ANFIS
to a neuro-fuzzy classifier for detection and
model has higher accuracy than the other Neuro-
diagnosis of induction motor status fault", 33rd
Fuzzy model types which compensates its less
Annual Conference of the IEEE Industrial
interpretable structure.
Electronics Society, Taipei, Taiwan, 2007.
[10] E. Zio, G. Gola, "A neuro-fuzzy technique for
fault diagnosis and its application to rotating
machinery", Reliability Engineering and
The authors acknowledge the support of grants of
System Safety, vol. 94, pp. 78-88, 2009.
the Fraunhofer Project Center for Production
[11] J. Chen, C. Roberts, P. Weston, "Fault
Management and Informatics at SZTAKI,
detection and diagnosis for railway track
Budapest, Hungary and the Highly industrialised
circuits using neuro-fuzzy systems", Control
region on the west part of Hungary with limited
Engineering Practice, vol. 16: (5), pp. 585-
R&D capacity: Research and development
programs related to strengthening the strategic
[12] Amitava Chatterjee, Ranajit Chatterjee,
future-oriented industries manufacturing
Fumitoshi Matsuno, Takahiro Endo, "Neuro-
technologies and products of regional competences
fuzzy state modelling of flexible robotic arm
carried out in comprehensive collaboration,
employing dynamically varying cognitive and
VKSZ_12-1-2013-0038, with iKOMP acronym.
social component based PSO", Measurement,
vol. 40, pp. 628-643, 2007.
References
[13] J. Guzinski, H. Abu-Rub, A. Iqbal, S. M.
Ahmed, "Shaft misalignment detection using
[1] M. Ayoubi, "Fuzzy systems design based on a
ANFIS for speed sensorless AC drive with
hybrid neural structure and application to the
inverter output filter", IEEE International
fault diagnosis of technical processes",
Symposium on Industrial Electronics, Gdansk,
Control Engineering Practice, vol. 4: (1), pp.
[14] I. Karimi, K. Salahshoor, "A new fault
[2] J. Zhang, J. Morris, "Process modelling and
detection and diagnosis approach for a
fault diagnosis using fuzzy neural networks",
distillation column based on a combined PCA
Fuzzy Sets and Systems, vol. 79, pp. 127-140,
and ANFIS scheme", 24th Chinese Control and
Decision Conference, Taiyuan, China, 2012.
[3] Sakuntala Mahapatra, Santanu K. Nayak,
[15] W. A. Wali, K. H. Hassan, J. D. Cullen, A.
Samrat L. Sabat, "Neuro fuzzy model for
Shaw, A. I. Al-Shamma's, "Real time
adaptive filtering of oscillatory signals",
monitoring and intelligent control for novel
Measurement, vol. 30, pp. 231-239, 2001.
advanced microwave biodiesel reactor",
[4] C. W. Frey, A. Jacubasch, H.-B. Kuntze,
Measurement, vol. 46, pp. 823-839, 2013.
„Smart neuro-fuzzy based control of a rotary
[16] Huseyin Eristi, "Fault diagnosis system for
hammer drill", IEEE International Conference
series compensated transmission line based on
on Robotics and Automation, vol. 2, pp. 2634-
wavelet transform and adaptive neuro-fuzzy
inference system", Measurement, vol. 46, pp.
[5] W. Wang, F. Ismail, A. F. Golnaraghi, "A
neuro-fuzzy approach to gear system
[17] Sunil K. Jha, Kenshi Hayashi, R. D. S.
monitoring", IEEE Transactions on Fuzzy
Yadava, "Neural, fuzzy and neuro-fuzzy
Systems, vol. 12: (5), pp. 710-723, 2004.
approach for concentration estimation of
[6] A. Evsukoff, S. Gentil, "Recurrent neuro-
volatile organic compounds by surface
fuzzy system for fault detection and isolation
acoustic wave sensor array", Measurement,
in nuclear reactors", Advanced Engineering
vol. 55, pp. 186-195, 2014.
Informatics, vol. 19, pp. 55-66, 2005.
[18] Shima Rahim Pouran, A. R. Abdul Aziz, Wan
[7] Z. Ye, A. Sadeghian, B. Wu, "Mechanical
Mohd Ashri Wan Daud, Shahaboddin
fault diagnostics for induction motor with
Shamshirband, "Estimation of the effect of
variable speed drives using Adaptive Neuro-
catalyst physical characteristics on Fenton-like
fuzzy Inference System", Electric power
oxidation efficiency using adaptive neuro-
System Research, vol. 76, pp. 742-752, 2006.
fuzzy computing technique", Measurement,
[8] Y. Lei, Z. He, Y. Zi, Q. Hu, "Fault diagnosis
vol. 59, pp. 314-328, 2015.
of rotating machinery based on multiple
[19] G. H. Roshani, S. A. H. Feghhi, A. Adineh-
Vand, M. Khorsandi, "Application of adaptive
for Prediction and Analysis in the Behaviour
neuro-fuzzy inference system in prediction of
Sciences, Ph. D Thesis, Harward University,
fluid density for a gamma ray densitometer in
Cambridge, 1974.
petroleum products monitoring", [32] T. Kohonen, Self-organized Formation of Measurement, vol. 46, pp. 3276-3281, 2013.
Topologically Correct Feature Maps,
[20] E. D. Übeyli, D. Cvetkovic, G. Holland, I.
Biological Cybernetics, 43, pp. 59-69, 1982.
Cosic, "Adaptive neuro-fuzzy inference
[33] D. S. Broomhead, D. lowe, Radial basis
system employing wavelet coefficients for
functions, multi-variable functional
detection of alterations in sleep EEG activity
interpolation and adaptive networks, RSRE
during hypopnoea episodes", Digital Signal
memorandum No. 4148, 1988.
Processing, vol. 20, pp. 678-691, 2010.
[34] Zs. J. Viharos, K. B. Kis, "Diagnostics of
[21] Sang-Hong Lee, Joon S. Lim, "Comparison of
wind turbines based on incomplete sensor
DBS and levopoda on resting tremor using a
data", IMEKO World Congress Technical
fuzzy neural network system", Measurement,
Diagnostics, Republic of Korea, 2012.
vol. 46, pp. 1995-2002, 2013.
[35] L. A. Zadeh, "Fuzzy Sets", Information and
[22] P. F. Alvanitopoulos, I. Andreadis, A. Elenas,
Control, vol. 8, pp. 338-353, 1965.
"Neuro-fuzzy techniques for the classification
[36] J. Vieira, F. M. Dias, A. Mota, "Neuro-Fuzzy
of earthquake damages in buildings",
Systems: A Survey", 5th WSEAS NNA
Measurement, vol. 43, pp. 797-809, 2010.
International Conference, 2004.
[23] Benyamin Khoshnevisan, Shahin Rafiee,
[37] E. H. Mamdani, S. Assilian, "An experiment
Mahmoud Omid, Hossein Mousazadeh,
in linguistic synthesis with a fuzzy logic
"Prediction of potato yield based on energy
controller", International Journal of Man-
inputs using multi-layer adaptive neuro-fuzzy
Machine Studies, vol. 7: (1), pp. 1-13, 1975.
inference system", Measurement, vol. 47, pp.
[38] T. Takagi, M. Sugeno, "Fuzzy identification
of systems and its applications to modeling
[24] Hamid Taghavifar, Aref Mardani,
and control", IEEE Trans, on Systems, Man
"Prognostication of vertical stress
and Cybernetics, vol. 15, pp. 116-132, 1985.
transmission in soil profile by adaptive neuro-
[39] R. Jang, "Fuzzy Modeling Using Generalized
fuzzy inference system based modelling
Neural Networks and Kalman Filter
approach", Measurement, vol. 50, pp. 152-
Algorithm", Proc. Ninth Nat. Conf. Artificial
Intell., pp. 762-767, 1991.
[25] S. Moharana, K. K. Khatua, "Prediction of
[40] R. Jang, "ANFIS: Adaptive-Network-Based
roughness coefficient of a meandering open
Fuzzy Inference System", IEEE Transactions
channel flow using Neuro-Fuzzy Inference
on systems, man, and cybernetics, vol. 23: (3),
System", Measurement, vol. 51, pp. 112-123,
pp. 665-685, 1993.
[41] T. C. Lin, C. S. Lee, "Neural Network Based
[26] S. Kar, S. Das, P. K. Ghosh, "Applications of
Fuzzy Logic Control and Decision System",
neuro fuzzy systems: A brief review and
IEEE Transactions on Computers, vol. 40:
future outline", Applied Soft Computing, vol.
(12), pp. 1320-1336, 1991.
15, pp. 243-259, 2014.
[42] H. R. Berenji, P. Khedkar, "Learning and
[27] P. Bilski, "Data set processing for the
Tuning Fuzzy Logic Controllers Through
optimization of the artificial intelligence-based
Reinforcements", IEEE Transactions on
diagnostic methods", IMEKO TC10
Neural Networks, vol. 3, pp. 724-740, 1992.
Workshop on Technical Diagnostics,
[43] D. Nauck, R. Kruse, "NEFCON-I: An X-
Florence, Italy, 2013.
Window Based Simulator for Neural Fuzzy
[28] M. Catelani, L. Ciani, "Diagnostic and Error
Controllers", Proc. IEEE Int. Conf. Neural
Correction System for Avionics Devices in
Networks, 1994.
Presence of Single Event Upset (SEU)",
[44] D. Nauck, R. Kruse, "NEFCLASS – A Neuro-
IMEKO TC10 Workshop on Technical
Fuzzy Approach For The Classification Of
Diagnostics, Florence, Italy, 2013.
Data", Applied Computing Proc. of the 1995
[29] W. S. McCulloch, W. Pitts, "A logical
ACM Symposium on Applied Computing, pp.
calculus of the ideas immanent in nervous
activity", Bulletin of Mathematical Biophysics,
[45] D. Nuck, R. Kurse, "Neuro-fuzzy systems for
vol. 5, pp. 115-133, 1943.
function approximation", Fuzzy Sets and
[30] F. Rosenblatt, The Perceptron -- a perceiving
Systems, vol. 101, pp. 261-271, 1999.
and recognizing automaton, Cornell
[46] F. C. Juang, T. C. Lin, "An On-Line Self
Aeronautical Laboratory, Report Number: 85-
Constructing Neural Fuzzy Inference Network
and its applications", IEEE Transactions on
[31] P. J. Werbos, Beyond Regression: New Tools
Fuzzy Systems, vol. 6, pp. 12-32, 1998.
[47] N. Kasabov, Q. Song, Dynamic Evolving
Fuzzy Neural Networks with ‘m-out-of-n' Activation Nodes for On-Line Adaptive Systems, Technical Report TR99/04, 1999.
[48] N. Kasabov, "Adaptable Connectionist
Production Systems", Neurocomputing, vol. 13: (2-4), pp. 95-117, 1996.
[49] N. Kasabov, "Evolving Fuzzy Neural
Networks – Algorithms, Applications and Biological Motivation", Methodologies for the Conception, Design and Application of Soft Computing, pp. 271-274, 1998.
Source: http://eprints.sztaki.hu/8231/1/Viharos_126_2885145_ny.pdf
conbook-verlag.de
»Der Umstand, dass alles, Tier und Mensch, nach der Lust verlangt und strebt, ist ein Zeichen, dass sie in gewissem Sinne das höchste Gut ist.« Aristoteles, ›Nikomachische Ethik‹ 322 v. Chr. Nachdem wir uns nun ausgiebig damit beschäftigt haben, wie sich in Griechenland Leib und Seele auf angenehme Weise zusammenhalten lassen, kommen wir zu allerhand leiblichem, bevor letztlich die Seele
Untitled
www.aidsmap.comissue 159 august/ september 2006 why smoking is more likely to kill you than HIV page 4 how confidential is confidential? when can doctors disclose your HIV status to others? page 8 moving from theory to practice page 18 treating genital herpes why HIV-positive people need specific treatment guidelines page 12 what's happening in HIV vaccine research?page 3