Moras09
Volumen 3, No. 1, 2009 Evaluación de un Sistema Inteligente de Semaforización Mediante Simulación para la Ciudad de Orizaba, Veracruz M.C. Constantino Gerardo Moras Sánchez Instituto Tecnológico de Orizaba [email protected] Departamento de Ingeniería Industrial Orizaba, Veracruz, México Ing. Juan Carlos Cortés Gutiérrez Instituto Tecnológico de Orizaba Departamento de Ingeniería Industrial Orizaba, Veracruz, México Dr. Luis Carlos Flores Ávila Instituto Tecnológico de Orizaba Departamento de Ingeniería Industrial Orizaba, Veracruz, México Dr. Alberto A. Aguilar Laserre Instituto Tecnológico de Orizaba Departamento de Ingeniería Industrial Orizaba, Veracruz, México Resumen Se realizó un estudio comparativo, en la zona centro de la ciudad de Orizaba, entre el sistema de control de tránsito actual conformado por semáforos de tiempo fijo y cruces "uno por uno", y tres propuestas de solución, cuyo funcionamiento radica en la utilización de semáforos inteligentes. Dicha comparación se basó en los resultados promedio de determinadas medidas de desempeño, y costos del tipo automotriz en que incurren los conductores al ejecutar la espera de sus vehículos. Este estudio requirió el uso del software especializado de simulación llamado ProModel, aplicando el método científico, además de herramientas como la estadística, la ingeniería de tránsito, etc., obteniendo resultados que ayudaron a elegir aquella alternativa de solución que mejorara en mayor grado el desempeño del sistema actual. Palabras clave: Simulación, ProModel, control de tráfico, semáforos inteligentes. Introducción El incremento en el uso de automotores para el transporte ha provocado un aumento en el número de congestionamientos de tránsito, evidenciándose en mayor grado en las áreas urbanas. Esta situación se ha agravado con el crecimiento elevado de la población, la falta de planeación y la falta de educación vial. Con la finalidad de encontrar soluciones que logren controlar y agilizar el tráfico vehicular, se han establecido en la ciudad de Orizaba, Veracruz, México programas de control de tráfico vehicular como semáforos de tiempo fijo, calles con preferencia1 y cruces "uno por uno". El presente trabajo analizó el sistema de tráfico actual de la zona centro de la ciudad de Orizaba mediante la técnica de simulación, con el objetivo de evidenciar las dificultades que éste presenta cuando el flujo vehicular aumenta considerablemente en las horas pico. Se evaluaron tres alternativas de solución, las cuales funcionan de manera distinta pero comparten el uso de un dispositivo llamado "semáforo inteligente", cuya forma de operar difiere de forma considerable respecto del semáforo de tiempo fijo. En las últimas secciones del artículo se presentan recomendaciones en base a los resultados de la simulación. En la actualidad existen diversos trabajos referentes a las técnicas utilizadas para el análisis del tráfico vehicular en las ciudades. Particularmente, en la ciudad de Orizaba únicamente existe el estudio realizado por Moras y Ojeda (2007) acerca de la evaluación de la eficiencia del programa de tránsito cruces "uno por uno" establecido en esta ciudad, con la finalidad de observar su manera de operar ante diferentes volúmenes de tráfico vehicular. El presente trabajo es el único que ha tratado el tema de la implementación de semáforos inteligentes en la ciudad de Orizaba, aunque es importante mencionar que se han desarrollado diversos estudios acerca del uso de semáforos o sistemas inteligentes. Tal es el caso de Warberg (2008), Cools et al. (2006), Wiering (2003), Domínguez y Aguirre (2007) y Albagul et al. (2006) que han creado sistemas que intentan variar el tiempo de duración del estado verde en los semáforos, basándose en las condiciones presentes del tráfico, con la finalidad de disminuir los tiempos de espera de los vehículos. Otros autores (Gilmore y Abe, 1995 y Wiering et al. 2004) han hecho uso de la inteligencia artificial y redes neuronales para desarrollar sistemas de control de tráfico inteligentes que aprendan con el tiempo la manera de comportarse de los automóviles y determinen el tiempo de duración del estado de verde de los semáforos en los cruceros. Particularmente, Wahle et al. (2001) presenta un sistema de simulación en línea que recibe constantemente información del tráfico en tiempo real. Algunos trabajos se enfocan a simular el comportamiento de los automóviles con la finalidad de obtener la información necesaria para crear nuevos sistemas que puedan controlar dicho comportamiento al simular el flujo de automóviles previamente estudiado bajo diferentes escenarios, como lo mencionan Ehlert y Rothkrantz (2001), Cao et al. (2006) y Ludmann et al. (1997). Penner et al. (2002) establece que la información referente al comportamiento de los vehículos puede ser utilizada para establecer las secuencias de los semáforos. Finalmente, Chung y Hui (1995) y Sasaki y Nagatani (2003) se enfocan en estudiar los efectos de los congestionamientos en los semáforos de tiempo fijo, semáforos que varían su ciclo, semáforos que crean una onda de verdes a lo largo de varios cruceros e incluso en semáforos que tienen algún defecto en su funcionamiento y no pueden operar adecuadamente. 1 E n e l s i s t e m a d e c a l l e s d e p r e f e r e n c i a e x i s t e u n a s e ñ a l d e a l t o p a r a u n a d e l a s c a l l e s d e l a i n t e r s e c c i ó n , m i e n t r a s Formulación del problema La ciudad de Orizaba, como muchas otras, está viviendo un incremento en el número de automóviles que circulan por sus calles. Este incremento ha creado problemas de congestionamiento vehicular en las zonas de mayor afluencia de autos, lo que provoca que el sistema actual de control de tráfico, formado por semáforos de tiempo fijo, cruces "uno por uno" y calles con preferencia, presente problemas para dar fluidez a tantos automóviles, especialmente en las llamadas horas pico. Recolección de datos y definición del modelo Se decidió estudiar el área correspondiente a la zona centro de la ciudad de Orizaba, ya que es la que sufre con mayor frecuencia de problemas de congestionamiento. Dicha área se delimitó por las calles Sur 2, Colón oriente, Sur 5 y Oriente 6. En total se estudiaron 27 calles y 12 cruceros, como se puede apreciar en la figura 1. Orizaba presenta el típico trazado de las ciudades coloniales de México con calles perpendiculares, de acuerdo al sistema conocido como Red de Manhattan en honor a la famosa isla neoyorquina. Figura 1. Calles y cruceros estudiados. Una vez delimitada el área de estudio, se procedió a recolectar la siguiente información: • Capacidad máxima de las calles, es decir, el número de autos que simultáneamente pueden estar presentes en una calle. • Número de autos por hora que entran al sistema a través de cada una de las ocho calles de entrada. • Tiempo que le toma a cada auto recorrer una calle tomando en cuenta la presencia o ausencia de otros autos. • Número máximo de autos en cada calle. El tiempo total de recolección de información fue de 14 horas diarias a partir de las 7 a.m. durante dos semanas, ya que incluyó las horas de tráfico normal y las horas de tráfico pico. Las medidas de desempeño que fueron analizadas mediante pruebas estadísticas para la validación del modelo de simulación del sistema actual son: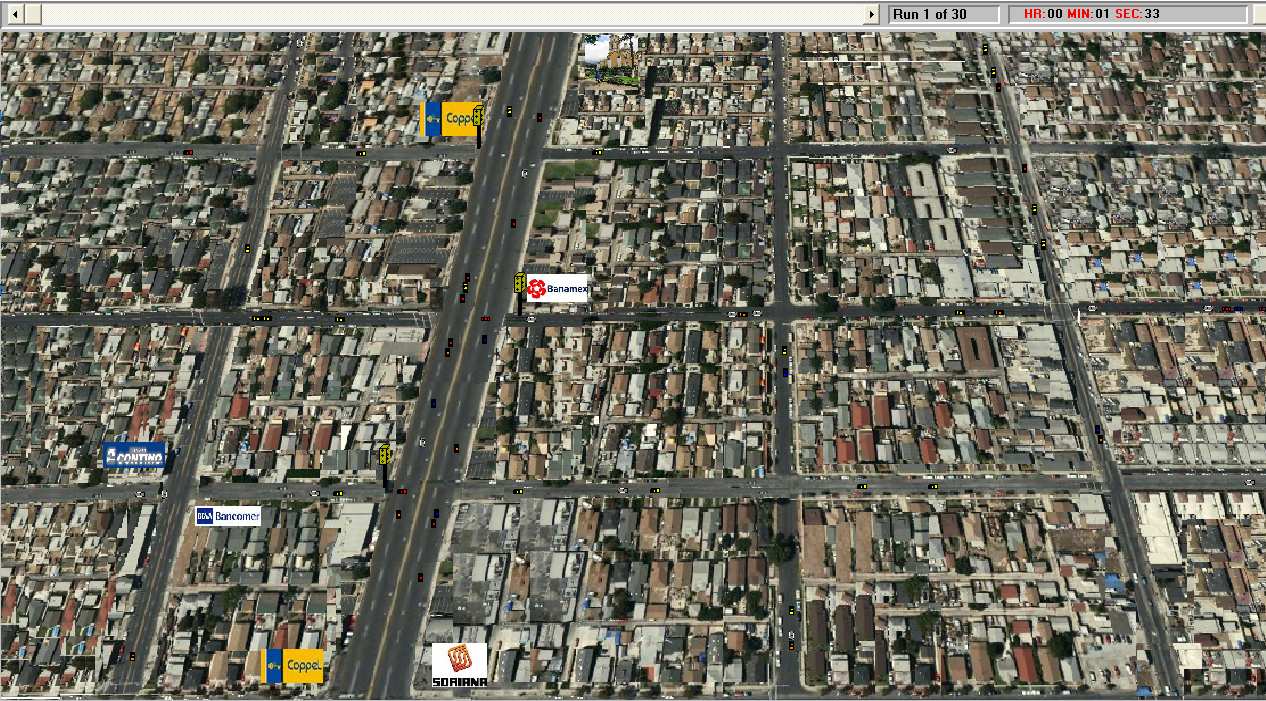
• Longitud promedio de las colas en las calles.
• Longitud máxima de las colas calles.
• Número total de autos que pasaron por cada calle.
Análisis estadístico de los datos Se procedió a determinar si los datos recopilados se ajustaban o no a alguna función de probabilidad teórica. Este análisis se realizó utilizando el programa Stat:fit, incluido en las herramientas de ProModel. Se aplicaron las pruebas de bondad de ajuste Chi-cuadrada, Anderson Darling y Kolmogorov-Smirnov a los datos correspondientes a la tasa de llegadas utilizando un nivel de significancia de =0.05.
Los resultados obtenidos reflejan que los datos recolectados no se ajustaron a ninguna distribución de probabilidad teórica que contiene el programa Stat:fit. Es por esto que se emplearon funciones de probabilidad empíricas, que fueron introducidas en el modelo de simulación mediante la opción arrival cycles. Construcción del modelo de simulación Se creó un modelo de simulación que representara al sistema de control de tráfico actual en la zona centro de la ciudad de Orizaba utilizando el software ProModel. Se utilizaron los datos previamente recolectados y analizados. En la figura 2 se muestra gráficamente el modelo construido. Pruebas piloto Se realizaron varias pruebas piloto del modelo construido para detectar y corregir las posibles fallas que pudieran haber ocurrido durante la construcción del modelo. Esto también ayudó a determinar si el modelo funcionaba adecuadamente, representando al sistema actual.
Figura 2. Modelo de simulación referente al sistema actual de control de tráfico del centro de la ciudad de Orizaba.
Validación del modelo de simulación Para realizar la validación del modelo de simulación del sistema actual, se aplicó la prueba estadística t-apareada, siguiendo el método propuesto por Law y Kelton (2000), con un nivel de significancia de =0.05. Esta técnica compara los resultados arrojados por el modelo de
simulación contra los datos reales observados, con la finalidad de corroborar que el programa arroje datos estadísticamente iguales a los del sistema actual. La prueba t-apareada se describe a continuación. Suponga que se recolectan m conjuntos de datos independientes del sistema y n conjuntos de datos del modelo. Sea XJ el promedio de las observaciones en el j-ésimo conjunto de datos del sistema, y YJ el promedio de las observaciones en el j-ésimo conjunto de datos del modelo. Las XJ son variables aleatorias IID con media µx=E(XJ), y las YJ son variables aleatorias IID (asumiendo que los n conjuntos de datos se obtuvieron de replicaciones diferentes) con media µy=E(YJ), por lo que se tratará de comparar el modelo con el sistema construyendo un intervalo de confianza para:
Z = µ − µ
utilizando la prueba t-apareada (se requiere que m = n). Las ecuaciones que se usan son las siguientes:
Z = X − Y
∑ Z − Z (n
Var Z (n)
(nn − )1
El intervalo de confianza es 100(1- ):
Z (n)± t
Sea l(α ) y u(α ) el límite de confianza inferior y superior respectivamente. Si 0 ∉ [l(α ),u(α )], entonces la diferencia observada entre µx y µy
Y (n)
se dice que es estadísticamente significante al nivel . Esto es equivalente a rechazar la
en favor de la alternativa:
Si 0 ∈ [l(α ),u(α )], cualquier diferencia observada entre µx y µy no es estadísticamente significante al nivel α y puede ser explicada por fluctuaciones aleatorias, aceptando así que el modelo es válido. Al aplicar la prueba t-apareada a las medidas de desempeño correspondientes a la longitud promedio de las calles, la longitud máxima de las calles y al número total de autos que pasaron por cada calle, se observó la inclusión del cero en los intervalos de confianza construidos, por lo que se aceptó como válido el modelo de simulación del sistema actual. Diseño de experimentos Para la determinación del número óptimo de replicaciones, se aplicó la ecuación que sugiere Law y Kelton (2000):
s 2 n
= mini ≥ n : t
Esta ecuación se utiliza para estimar la media poblacional µ=E(x), con un error específico permitido (β), una vez que el modelo ha sido validado. Tomando como medida de desempeño el número promedio de autos en cada calle, estableciendo un error β=0.8 autos y con un nivel de confianza del 90%, el valor de i fue incrementándose hasta obtener un número óptimo de corridas de 30; número que cumplió con la condición establecida en la ecuación 9. Alternativas de solución Se determinó utilizar semáforos inteligentes para la regulación del tránsito, como una propuesta de solución a la problemática que se ha venido tratando a lo largo de este trabajo. Antes de explicar el funcionamiento general de los semáforos inteligentes, se deben considerar las siguientes definiciones:
• Estado de verde permanente. Estado en el cual el tiempo de la luz verde del
semáforo permanecerá constante, es decir, sin posibilidad de cambio a ámbar. Esto se debe a que la calle perpendicular no tiene presencia alguna de automóviles.
• Estado de verde variable. Estado en el cual el tiempo de la luz verde dejará de ser
constante y tendrá un tiempo de duración que dependerá de la presencia o no de autos en la misma calle a la cual se le está dando el estado de luz verde, el cual puede variar de un tiempo mínimo de seis segundos a un tiempo máximo de 20 segundos
El tiempo de ciclo para los semáforos de tiempo fijo comúnmente utilizados es constante en todo momento, es decir, los tiempos destinados para el verde, ámbar y rojo no cambian a lo largo del día sin importar el nivel de tráfico presente en un determinado crucero con un semáforo de este tipo. Por otro lado, los semáforos inteligentes tienen la particularidad de variar su tiempo de ciclo de acuerdo al flujo de automóviles que exista en las calles pertenecientes al crucero donde el dispositivo está colocado. Los semáforos inteligentes pretenden variar los tiempos de los estados de verde, ámbar y rojo, dependiendo de la cantidad de automóviles presentes en las calles bajo su dominio.
La manera de operar cada semáforo inteligente se presenta a continuación, teniendo en consideración que N representa el número de autos en una determinada calle, la cual puede tomar valores desde cero hasta valores máximos de 12, 13, 14 y 15 autos, dependiendo de las capacidades máximas para contener autos en las calles estudiadas. Es necesario señalar que la luz ámbar siempre tiene una duración de diez segundos y el tiempo de duración de la luz roja dependerá totalmente de la duración del estado verde de la calle perpendicular. En la figura 3 se pueden observar las calles 1 y 2, así como el semáforo inteligente. Inicialmente se puede observar la ausencia de autos en ambas calles, por lo que el semáforo inteligente mantiene el estado de verde permanente en la calle 1 y el estado rojo en la calle 2.
Figura 3. Calles 1 y 2 sin presencia de autos. Cuando comienzan a circular automóviles sobre la calle 1, el semáforo continuará dando la luz verde a la calle 1 de manera permanente, mientras no existan autos en la calle 2, como se muestra en la figura 4. Al momento en que los autos comienzan a fluir a través de la calle 2, como se muestra en la figura 5, el verde permanente de la calle 1 cambia a un estado de verde variable haciendo que éste tome distintos valores de tiempo, dependiendo de la presencia o no de autos en la calle 1. Esto es, cada determinado tiempo el semáforo inteligente preguntará si existen o no autos en la calle 1; si los hay, el tiempo del verde se extenderá cada vez más hasta un máximo de 20 segundos; si por el contrario no llegaran a existir autos, el tiempo del verde se reducirá hasta un mínimo de seis segundos. Es importante mencionar que el estado de verde variable no puede cambiar al estado de verde permanente hasta que se haya completado el ciclo, es decir, hasta que el ámbar y rojo hayan sucedido. Una vez terminado el tiempo del verde variable en la calle 1, el estado cambia a color ámbar como se muestra en la figura 6.
Una vez terminado el tiempo del ámbar en la calle 1, el estado del semáforo inteligente cambiará a rojo, cambiando simultáneamente a verde en la calle 2. Nuevamente, el verde de la calle 2 será permanente o variable, dependiendo de la existencia o no de autos en la calle 1, como se muestra en la figura 7. Todas estas operaciones conformarán el ciclo del semáforo inteligente.
Figura 4. Presencia de autos en calle 1. Figura 5. Presencia de autos en calle 2.
Figura 6. Color ámbar en calle 1. Se realizaron algunas modificaciones al modelo de simulación del sistema actual, a fin de evaluar a la solución propuesta bajo las mismas condiciones y observar si los resultados arrojados muestran una mejoría en lo referente al flujo de automóviles y a los costos generados por circular en la zona de estudio. Debido a la gran cantidad de cruceros existentes en la zona centro de la ciudad de Orizaba, se evaluaron tres modelos, conteniendo varias combinaciones en la colocación de los semáforos inteligentes con semáforos de tiempo fijo a fin de observar y comparar los resultados arrojados por cada modelo de simulación y elegir como el mejor aquél que brinde los mejores resultados para la ciudad de Orizaba.
Figura 7. Verde permanente o variable en calle 2.
Alternativa 1: Red de semáforos inteligentes en todos los cruceros La alternativa 1 (A1) presenta un modelo de simulación conformado por una red de semáforos inteligentes en el área de estudio. Esto es, se colocó un dispositivo en cada uno de los cruceros con la finalidad de tener un control total de éstos sobre el flujo vehicular, haciendo un total de 12 semáforos inteligentes. Alternativa 2: Semáforos de tiempo fijo en la calle Francisco I. Madero y semáforos inteligentes en los cruceros restantes La alternativa 2 (A2) presenta una combinación de semáforos de tiempo fijo con semáforos inteligentes. Dicho modelo contiene tres semáforos de tiempo fijo a lo largo de los tres cruceros de la calle Francisco I. Madero, una de las más transitadas de la ciudad debido a la presencia de muchos comercios. Por otro lado, se colocaron semáforos inteligentes en los nueve cruceros restantes, haciendo un total de nueve dispositivos inteligentes, con la finalidad de observar el funcionamiento de esta combinación en la zona de estudio. Alternativa 3: Semáforos inteligentes en la calle Francisco I. Madero y semáforos de tiempo fijo en los cruceros restantes La alternativa 3 (A3) contiene una vez más una combinación de semáforos inteligentes con semáforos de tiempo fijo. Este modelo presenta tres semáforos inteligentes en cada crucero de la calle Francisco I. Madero, ratificada por los resultados arrojados por el modelo del sistema actual como una de las más transitadas. También se instaló un semáforo de tiempo fijo en cada uno de los nueve cruceros restantes del modelo. Cabe mencionar que las tres alternativas presentadas se simularon 30 veces, es decir, se corrieron el número de replicaciones arrojadas por el diseño de experimentos para el modelo del sistema actual. En las secciones posteriores se presenta el análisis y comparación de los resultados de cada alternativa de solución respecto al modelo del sistema actual. Comparación de resultados entre cada alternativa de solución respecto al modelo del sistema actual Se realizó una comparación entre los resultados arrojados por cada una de las alternativas de solución propuestas y el modelo de simulación del sistema actual, con el fin de analizar el
rendimiento de cada propuesta de solución y determinar la mejor de todas. Dicha comparación se llevó a cabo en base a una serie de medidas de desempeño, que fueron clasificadas en tres grandes rubros:
• Medidas de desempeño referentes a la cantidad de autos.
• Medidas de desempeño de tiempo.
• Medidas de desempeño de costos.
Medidas de desempeño referentes a la cantidad de autos Estas medidas de desempeño están relacionadas con los automóviles que interactuaron dentro del modelo de simulación construido, tanto para las alternativas de solución como para el sistema actual. La primera medida de desempeño evaluada fue la referente al número total de autos que pasaron por cada calle a lo largo de 14 horas de simulación, como se muestra en la figura 8. Se pretende que las propuestas de solución agilicen la circulación de los automóviles, incrementando así el número de autos en las calles. La segunda medida de desempeño se relaciona con el total de autos que salieron del sistema por hora a lo largo de toda la simulación. Cabe mencionar que debido a que en las horas pico el número de autos se incrementa considerablemente, es de esperarse que las salidas aumenten proporcionalmente en cada modelo construido, como se observa en la figura 9. Las alternativas de solución propuestas deberán agilizar el flujo vehicular, disminuyendo el tiempo de espera de los autos y como consecuencia elevar el número de salidas del sistema. La tercera medida de desempeño es aquella relacionada con las llegadas fallidas, es decir, el número de autos que no pudieron ingresar al sistema, debido a que las calles a las cuales estaban destinados a llegar se encontraban a su máxima capacidad, lo que provoca que ProModel literalmente las destruya, generando un reporte estadístico para esta situación. Esto se puede apreciar en la figura 10. Las llegadas fallidas se presentaron en las ocho calles de entrada que alimentan al sistema. Esta información es muy útil para el investigador, ya que es una medida de qué tan saturado se encontraba el sistema actual a lo largo de la simulación. Con las alternativas de solución propuestas se pretende agilizar el tráfico vehicular, disminuyendo los congestionamientos y el número de llegadas fallidas al sistema. Se puede apreciar en la figura 8 que la calle que tuvo mayor presencia de automóviles a lo largo de las 30 replicaciones fue la calle Madero Sur izq. A, correspondiente a la alternativa A2 y que registró un promedio de 6167.6 autos. Como se especifica en la figura 9, la alternativa A2 fue la que presentó mayor número de salidas del sistema, destacando el promedio de 4575 autos entre las 14 y 15 horas, aunque la alternativa A1 también presentó un número de salidas considerablemente alto. Como se puede observar el número de salidas se incrementó considerablemente en todos los modelos en las horas pico. El modelo del sistema actual fue el que presentó mayores congestionamientos a lo largo de la simulación, ya que el número de autos que no pudieron ingresar al sistema fue mayor respecto a las alternativas de solución, como se puede observar en la figura 10.







Es importante señalar que la alternativa A2 fue la que presentó un sistema más fluido, sobresaliendo la entrada E Sur 5C con únicamente un promedio de 0.43 autos que no pudieron ingresar al sistema a lo largo de las 30 replicaciones.
Número total de autos que pasaron por cada calle
A1, 5.70593
A2, 6.1676
A3, 4.35087
Figura 8. Comparación del número total de autos que pasaron por cada calle.
Número total de autos que salieron del sistema por hora
A2, 4.57537
A1, 4.3471
A3, 3.64427
d
s
ile 2.0
11-12 hrs 12-13 hrs
14-15 hrs 15-16 hrs
Hora del día
Figura 9. Comparación del total de autos que salieron del sistema por hora. Medidas de desempeño de tiempo Se describe en esta sección el análisis de las medidas de desempeño que están íntimamente ligadas al tiempo transcurrido en el sistema por los automóviles. La primera de estas medidas es el porcentaje del tiempo en estado de espera en el sistema, es decir, el tiempo que los automóviles permanecieron encendidos pero sin movimiento, ya sea por la espera ocasionada por la luz roja del semáforo o quizá por encontrarse en alguna calle congestionada, ya que se pretende disminuir los tiempos de espera de los automóviles al poner en funcionamiento el semáforo inteligente. Este porcentaje se refiere al tiempo efectivo que pasaron los automóviles en estado de espera, respecto del tiempo total de simulación, como se muestra en la figura 11. La información recolectada para esta medida de desempeño fue reportada cada hora.
Número total de autos que no pudieron ingresar al sistema
E MaderoSur izq E MaderoSur der
Figura 10. Comparación del promedio de autos que no pudieron ingresar al sistema. El mayor porcentaje del tiempo de espera se presentó nuevamente en las horas pico. Esto se debe principalmente al incremento de automóviles en el sistema en esos momentos del día, como se aprecia en la figura 11. Cabe mencionar que la alternativa A1 fue la que presentó un menor porcentaje en esta medida de desempeño, lo que se traduce en un sistema más fluido.
Porcentaje del tiempo en espera de los autos por hora
Sistema actual, 94.30%
11-12 hrs 12-13 hrs
Hora del día
Figura 11. Comparación del porcentaje del tiempo en espera de los autos por hora. La segunda medida de desempeño se refiere al tiempo promedio de permanencia en el sistema por auto, es decir, el tiempo que transcurrió desde que un automóvil entró al sistema hasta que salió de éste en cada replicación corrida en el modelo de simulación, como se observa en la figura 12. Se puede observar que la alternativa A1 fue la que presentó un menor tiempo de permanencia en el sistema a lo largo de todas las corridas, destacando el valor de 92.35 segundos como el más pequeño de todos y que ocurrió en la corrida número 23. Medidas de desempeño de costos Una de las medidas de desempeño que tienen gran impacto en cualquier sistema es la referente a los costos. Particularmente, cualquier alternativa de solución que agilice la circulación de automóviles, reducirá los congestionamientos y por lo tanto los costos
generados por circular dentro del sistema. Como medida convencional se consideraron para este estudio sólo los vehículos de motor a gasolina, ya que son los que circulan con mayor frecuencia por las calles de una ciudad, en relación con los autobuses de pasaje, que son de motor a diesel.
Tiempo promedio de permanencia en el sistema por auto
Número de la corrida
Figura 12. Comparación del tiempo promedio de permanencia en el sistema por auto. A continuación se presenta una estimación promedio de los costos por vehículo, en base a información obtenida de libros especializados y opiniones de expertos en mecánica automotriz entrevistados en la ciudad de Orizaba. La primera medida de desempeño de costos es la relacionada con el movimiento de frenado y arranque por automóvil, como se observa en la figura 13. El frenado es aquella acción que genera una sucesión de movimientos en el sistema mecánico automotriz, el cual resulta en la presión de un conjunto de balatas que se desgastan cada vez que se realiza tal acción. Para fines de estimar el costo de frenado en cada uno de los sistemas expuestos, se consideró $0.07 pesos2 como una estimación promedio del desgaste de balatas por vehículo cada vez que un conductor efectúa una acción de frenado. Para quitar un vehículo de su estado de reposo, se requiere del uso de energía que se genera del combustible que se suministra al motor de un vehículo, por esta razón el costo de arranque-aceleración está directamente relacionado con el número de cilindros del motor. En la tabla 1 se muestra una estimación del costo de arranque-aceleración de los vehículos cada vez que se realiza la actividad correspondiente. Este costo es muy importante, ya que se incrementará cada vez que existe un embotellamiento vehicular, lo que provoca entre otras cosas, un desgaste prematuro de las balatas del automóvil y un consumo extra de gasolina. La segunda medida de desempeño es el costo por permanecer en estado ralentí por auto, es decir, mantener un automóvil encendido pero sin realizar un avance efectivo, como se aprecia en la figura 14. En base a la información adquirida acerca del consumo de gasolina por hora de los automóviles en el llamado estado ralentí o de funcionamiento en frío (Arias-Paz, 2006), se obtuvo la información que presentamos en la tabla 2.
Tabla 1. Costo de arranque-aceleración de vehículos (en pesos mexicanos).
Costo por arranque-aceleración
Número de cilindros del motor
Tabla 2. Consumo de gasolina en litros/hora en estado ralentí.
Consumo de gasolina en
Número de cilindros del motor
(litros por hora)
8 cilindros y más
Al incrementarse el flujo vehicular en las calles bajo el sistema actual de control de tránsito, las calles comienzan a congestionarse provocando que los automóviles tengan que esperar con sus autos encendidos y sin poder realizar algún tipo de movimiento. La tercera medida de desempeño se refiere al costo debido al consumo de gasolina por auto al circular por el área de estudio (figura 15). Este costo se calculó utilizando la información de la tabla 2 y representa un indicador importante para el presente trabajo, ya que se traduce en una gran cantidad de gasolina consumida por todos los autos, únicamente en este cuadro de la ciudad a lo largo de un día simulado. La última medida de desempeño es la del costo total presente en la zona centro de la ciudad. Este costo es el resultado de sumar todos los costos descritos en los párrafos anteriores. La gráfica del costo total se muestra en la figura 16. Se espera que las alternativas de solución disminuyan los costos y como se puede apreciar en la figura 13, las alternativas 2 y 3 reducen el costo de frenado-arranque en el sistema por auto; sin embargo, la alternativa 1 no logró disminuirlo debido a los costos tan altos que presentó en algunas corridas. La alternativa A3 es la que brindó el costo más pequeño en la corrida 21, el cuál fue en promedio de $0.06167 por auto. La alternativa A1 es la que presentó una mayor reducción del costo por permanecer en estado ralentí por auto a lo largo de todas las replicaciones, como se muestra en la figura 14. Se destaca el valor promedio de $0.0946 por auto presentado en la corrida número 23. En la figura 15 se presenta el costo debido al consumo de gasolina por auto. Se observa que una vez más la alternativa A1 es la que presentó el menor costo en todas las replicaciones, sobresaliendo el costo promedio mostrado en la corrida número 23 como el más pequeño de todas las alternativas.
Costo de frenado-arranque en el sistema por auto
Sistema a ctual
Núme ro de la corrida
Figura 13. Comparación del costo de frenado-arranque en el sistema por auto.
Costo por permanecer en estado ralentí por auto
Sistema a ctua l
A2, $0.1460
$
s
o
s
e 0.19
Núme ro de la corrida
Figura 14. Comparación del costo por permanecer en estado ralentí por auto.
Costo debido al consumo de gasolina por auto
A2, $1.806
Siste ma actual
A3, $1.713
Número de la corrida
Figura 15. Comparación del costo debido al consumo de gasolina por auto. La alternativa A1 fue la que presentó el menor costo total a lo largo de todas las replicaciones respecto de las demás alternativas, destacando el costo de la replicación número 23 con un valor promedio de $1.67 por auto, mostrado en la figura 16.
Costo total por auto
Siste ma actual
$
s
o
s
e
P 2.0
Núme ro de la corrida
Figura 16. Comparación del costo total por auto en el sistema actual de control de tráfico. Prueba de todos contra todos para determinar la mejor alternativa Se construyeron una serie de intervalos de confianza para determinar estadísticamente cuál es la mejor alternativa. Esto es, con los intervalos se detectaron y cuantificaron las diferencias significativas entre las tres propuestas de solución. Una de las técnicas apropiadas para este caso es la prueba t-apareada, con la cual se compararon todas las alternativas contra todas. Una de las condiciones para aplicar esta técnica es asegurar que el número de corridas para cada una de las alternativas sea el mismo. La prueba t-apareada consiste en formar intervalos de confianza para las diferencias de
µ − µ , para toda i
1 e i2 entre 1 y k sistemas, con i1 < i2, donde i es el número de corrida y
j el número del sistema. De esta manera, se forma un número de intervalos iguales a k(k-1)/2, donde cada intervalo es calculado a un nivel de confianza de 1- α /[k(k-1)/2]. Esto se realiza con el objetivo de lograr que el nivel de confianza global sea de 1-α . La técnica menciona que si el intervalo de confianza contiene al cero, no existe una diferencia significativa entre los sistemas. En caso contrario, si el intervalo excluye al cero, existe una diferencia significativa y por lo tanto, un sistema puede ser considerado ser mejor que otro, dependiendo si el intervalo es positivo o negativo. A continuación se presentan las fórmulas utilizadas en la prueba t-apareada (Law, 2000) para la prueba de todos contra todos:
Z (n)
∑ Z j − Z(n)
Var Z (n)
n(n − )
Z (n)
± tn− −
= Diferencias entre los sistemas.
Z (n)
= Promedio de las diferencias entre los sistemas.
Var Z (n)
= Varianza de las diferencias entre los sistemas.
Z (n)
± tn− −
= Intervalo de confianza.
Debido a que en el presente estudio se proponen tres alternativas de solución, se tiene que k=3, por lo tanto el número de intervalos será igual a k(k-1)/2 = 3(3-1)/2=3. En la tabla 3 se muestran los intervalos construidos para las tres alternativas de solución propuestas.
Tabla 3. Intervalos de confianza para las tres alternativas de solución.
Alternativa 2 (A2)
Alternativa 3 (A3)
Alternativa 1 (A1) Intervalo 1 (A2 vs A1) Intervalo 2 (A3 vs A1)
Alternativa 2 (A2)
Intervalo 3 (A3 vs A2)
Alternativa 3 (A3)
El cálculo del nivel de confianza para los intervalos individuales se presenta a continuación:
Para un = 5% se tiene:
Nivel de confianza global = 1 – = 1 – 0.05 = 0.95 = 95%
Nivel de confianza individual= 1- /[k(k-1)/2] = 1- 0.05/[3(3-1)/2] = 0.983 = 98.3%
Se compararon todas las medidas de desempeño referentes a la cantidad de autos, al tiempo y costos, explicadas en las secciones anteriores. La prueba de todos contra todos requiere de un valor para todas las medidas de desempeño evaluadas denominado n, el cual se refiere al número de veces que se corrió cada modelo de simulación. Esto es, todos los modelos de simulación construidos para el presente estudio fueron corridos 30 veces. Por lo tanto, el valor ideal de n sería de 30 para todas las medidas de desempeño; sin embargo, algunas de estas medidas como el número total de autos que pasaron por cada calle o el número total de autos que salieron del sistema por hora, no necesitaron información por cada corrida, sino por calle (27 calles) y por hora de simulación (14 horas) respectivamente. Es importante mencionar que la información recolectada para cada calle y hora transcurrida se calculó como el promedio de las 30 corridas, por lo que su valor de n será de 27 y 14 respectivamente, con la finalidad de no afectar a la prueba. Cabe señalar que las medidas de desempeño de costos sí necesitaron información por cada corrida realizada, por lo que su valor de n será de 30. La relación de los valores se presenta en la tabla 4. Los valores de la distribución t-student utilizada para los intervalos individuales se muestra en la tabla 5 utilizando un =1.7% y los valores de n establecidos
Tabla 4. Relación de valores asignados a n para la prueba de todos contra todos.
Medida de desempeño
n: número de corridas
Número total de autos que pasaron por cada calle
Número total de autos que salieron del sistema por hora
Número total de autos que no pudieron ingresar al sistema
Porcentaje del tiempo en espera de los autos por hora
Tiempo promedio de permanencia en el sistema por auto
Costo frenado-arranque en el sistema por auto
Costo por permanecer en estado ralentí por auto
Costo debido al consumo de gasolina por auto
Costo total por auto
Tabla 5. Cálculo de la t-student para los intervalos de confianza.
En la tabla 6 se presenta la prueba estadística de todos contra todos para la medida de desempeño referente al número total de autos que salieron del sistema por hora. Se observa que las columnas correspondientes a cada alternativa (A1, A2 y A3) presentan los datos referentes a la medida de desempeño evaluada. Las tres columnas (A2 vs A1, A3 vs A1 y A3 vs A2) presentan las diferencias entre las alternativas de solución de dicha medida. Posteriormente se calcula la media y la varianza de esas diferencias para finalmente construir los intervalos de confianza. Por último, se puede apreciar que ninguno de los intervalos contiene al cero, por lo tanto, sí existe una diferencia significativa entre las tres alternativas de solución evaluadas. Además, se puede afirmar que estadísticamente la alternativa 2 presentó un mayor número de salidas respecto de las alternativas 1 y 3. Las pruebas realizadas a las medidas de desempeño restantes se concentraron en las tablas 7, 8 y 9, las cuales presentan únicamente los intervalos de confianza construidos. Como se puede observar en dichas tablas, existieron intervalos que sí incluyeron al cero y por otro lado, los que no lo incluyeron debido a que obtuvieron sólo valores positivos o sólo valores negativos. La interpretación de estas tablas para cada medida de desempeño se describe a continuación.
Tabla 6. Prueba de todos contra todos respecto al número total de autos que salieron del sistema por hora.
Número total de autos que
salieron del sistema por
3338.87 3307.60 3096.40
1946.43 1955.83 1945.77
1122.97 1124.30 1124.03
2235.33 2232.20 2219.83
4347.10 4575.37 3644.27
2479.10 2852.23 1422.97
2664.47 3074.00 1529.47
3924.03 4457.53 2176.03
2639.48 3068.03 1468.28
23799.47 42706.02
Límite inferior
Límite superior
A3 < A1 < A2
Los intervalos construidos para el número total de autos que pasaron por cada calle no contienen al cero, por lo que sí existe una diferencia significativa entre ellos, como se muestra en la tabla 7. Además, se puede concluir que estadísticamente la alternativa 2 presentó un número mayor de autos que las alternativas 1 y 3. Los intervalos construidos para el número total de autos que no pudieron ingresar al sistema no contienen al cero, por lo que sí existe una diferencia significativa entre ellos. Además, se puede decir que estadísticamente la alternativa 2 presentó un menor número de autos respecto de las alternativas 1 y 3, como se aprecia de nueva cuenta en la tabla 7. Los intervalos construidos para el porcentaje del tiempo en espera en el sistema de los autos por hora no contienen al cero, por lo que sí existe una diferencia significativa entre ellos. Además, se puede decir que estadísticamente la alternativa 1 presentó un menor porcentaje que las alternativas 2 y 3, como lo muestra la tabla 8. El tercer intervalo referente al tiempo promedio de permanencia en el sistema por auto e incluido en la misma tabla 8, contiene al cero (A3 vs A2), resaltando dicho intervalo con sombreado, por lo que no existe una diferencia significativa entre los resultados de las alternativas 3 y 2. Además, se puede inferir que estadísticamente la alternativa 1 fue la que presentó un menor tiempo promedio de permanencia en el sistema.
Tabla 7. Intervalos de confianza construidos para las medidas de desempeño referentes a la cantidad de autos.
Número total de autos que
Número total de autos que no
pasaron por cada calle
pudieron ingresar al sistema
A3 < A1 < A2
A2 < A1 < A3
Tabla 8. Intervalos de confianza construidos para las medidas de desempeño de tiempo.
Tiempo promedio de
Porcentaje del tiempo en
permanencia en el sistema por
espera de los autos por hora
A1 <A2 < A3
Los intervalos 1 y 3 referentes al costo de frenado-arranque en el sistema por auto sí contienen al cero, resaltando dichos intervalos con un sombreado, por lo que no existe una diferencia significativa entre todas las alternativas, es decir, sus datos son estadísticamente iguales, como se muestra en la tabla 9. Ahora, es difícil tomar una decisión ante esta situación, ya que la prueba no arroja resultados que ayuden al investigador, por lo tanto, la decisión se basará en el intervalo 2 que muestra a la alternativa 3 como más pequeña que la alternativa 1, concluyendo que ésta es la que presenta un menor costo de frenado-arranque por auto. La tabla 9 también presenta los intervalos construidos para el costo por permanecer en estado ralentí por auto, los cuales no contienen al cero, por lo que sí existe una diferencia significativa entre ellos. Además, se puede decir que estadísticamente la alternativa 1 presentó un menor costo que las alternativas 2 y 3. El intervalo 3 referente al costo debido al consumo de gasolina por auto sí contiene al cero, resaltando dicho intervalo con un sombreado de color amarillo, por lo que sí existe una diferencia significativa entre las alternativas 3 y 2. Además, se puede decir que estadísticamente la alternativa 1 presentó un menor costo respecto de las alternativas 2 y 3, como se aprecia en la tabla 9.
Por último, los intervalos construidos para el costo total por auto no contienen al cero por lo que sí existe una diferencia significativa entre ellos. Además, se puede decir que estadísticamente la alternativa 1 presentó un menor costo total que las alternativas 2 y 3. Esto se observa en la tabla 9. Tabla 9. Intervalos de confianza construidos para las medidas de desempeño de costos.
Costo frenado-arranque en el
Costo por permanecer en
sistema por auto
estado ralentí por auto
Límite inferior
Límite superior
A1 < A2 < A3
Costo debido al consumo de
Costo total por auto
gasolina por auto
Límite inferior
Límite superior
A1 < A2 < A3
En base a las interpretaciones anteriores, se concluye que bajo la prueba de todos contra todos, la alternativa 1, que contiene una red de semáforos inteligentes en los 12 cruceros, es estadísticamente la que presenta mejores resultados y es la que debe ser tomada en cuenta como la mejor de las tres. Conclusiones En el presente trabajo se trató la problemática de la existencia de congestionamientos en las calles de la zona centro de la ciudad de Orizaba cuando el nivel de flujo vehicular aumenta considerablemente en las horas pico. En todo momento se buscó una solución a dicho problema mediante el análisis previo del sistema actual de control de tráfico, con la finalidad de resaltar su incapacidad para controlar la circulación ante una demanda creciente en el número de autos. Se demostró que la combinación de los programas de tránsito de semáforos de tiempo fijo con cruces "uno por uno" en una misma zona, entorpece la circulación de automóviles, debido a la manera particular de operar de cada programa, ya que mientras el primero ofrece una mejor fluidez al sistema cuando el nivel de tráfico es alto, el segundo mantiene un flujo constante de autos siempre y cuando el nivel de tráfico sea bajo, además de que provoca un número muy alto de paros causados por la naturaleza misma del programa. Una vez terminado este análisis, surgieron tres propuestas de solución, que si bien fueron viables respecto a los resultados arrojados, fue necesario realizar una comparación estadística entre ellas para seleccionar aquélla que brindara un mejor control y una fluidez tal al sistema que minimizara los costos y aumentara el rendimiento general de éste ante cualquier nivel de flujo vehicular. Cada alternativa de solución contó con la presencia de un dispositivo llamado semáforo inteligente, capaz de controlar el tráfico vehicular y maximizar
el flujo de automóviles. Cabe mencionar que este dispositivo fue capaz de operar de manera correcta sin importar las condiciones de tráfico a las que se enfrentó. Terminadas las evaluaciones y comparaciones de las alternativas de solución, se concluyó que la mejor propuesta fue aquélla que incluía una red de semáforos inteligentes en los 12 cruceros del centro de Orizaba, debido a que en todo momento mantuvo un control total sobre el sistema, además que disminuyó en gran medida los costos totales por auto y mejoró considerablemente las medidas de desempeño referentes al rendimiento del sistema. Referencias bibliográficas Arias-Paz, M., Manual de automóviles, Editorial Dossat, España, 2006. Albagul A., M. Hrairi y M.F. Hidayathullah, "Design and development of sensor base traffic light system", http://findarticles.com/p/articles/mi_7109/is_3_3/ai_n28395598, consultada el 28 de Diciembre del 2008. Aldape, C. R. y J. Jalle, Los semáforos y el control dinámico del tránsito, Editorial Representaciones y servicios de Ingeniería S.A. de C.V., México, 1986. Cal, R.l., R. Mayor y G. James Cárdenas, Ingeniería de Tránsito, Editorial Alfaomega, México, 1994. Cao J., M. Li, L. Huang, R. Qinsheng y Y. Li, "Towards Building an Intelligent Traffic Simulation Plataform", http://pdcc.ntu.edu.sg/dsgrid06/doc/0064_cao-trafficsimulation.pdf, consultada el 29 de Diciembre del 2008. Chung K.H. y P. M. Hui, "Two-dimensional traffic flor problems with faulty traffic lights", http://prola.aps.org/abstract/PRE/v51/i1/p772_1, consultada el 30 de Diciembre del 2008. Cools S., C. Gershenson y B. D'Hooghe, "Self-organizing Traffic Lights: A realistic simulation", http://arxiv.org/abs/nlin.AO/0610040, consultada el 4 de Enero del 2009. Coss Bu, R., Simulación, Un enfoque práctico, Editorial Limusa, México, 1990. Domínguez, J.H. y J.L. Aguirre, "Traffic Light Control Through agent-based coordination", http://portal.acm.org/citation.cfm?id=1295328, consultada el 5 de Enero del 2009. Ehlert, P.A.M. y L.J.M. Rothkrantz, "Microscopic traffic simulation with reactive driving agents", http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=948773, consultada el 7 de Enero del 2009. Gilmore J., y N. Abe, "Neural network models for traffic control and congestion prediction", http://www.informaworld.com/smpp/content content=a771394121 db=all, consultada el 4 de Enero del 2009. Hoover V. y R.F. Perry, Simulation, A Problem-Solving Approach, Editorial Addison-Wesley, U.S.A., 1990. Law, A.M. y D.W. Kelton, Simulation Modeling and Analysis, Editorial Mc Graw Hill, U.S.A., 2000.
Ludmann J., D. Neunzig y M. Weilkes, "Traffic simulation with consideration of driver models, theory and examples", http://www.informaworld.com/smpp/content content=a780809485 db=all, consultada el 3 de Enero del 2009. Moras Sánchez, C. e I. Ojeda, "Evaluación de la eficiencia del programa de tránsito ‘cruces uno por uno', en la ciudad de Orizaba, Veracruz, México, mediante microsimulación", Revista de la Ingeniería Industrial, Volumen 1, No. 1, 2007, consultada el 4 de Enero del 2009. http://academiajournals.com/downloads/MorasOjeda.pdf Penner J., R. Hoar y C. Jacob, "Swarm-based traffic simulation with evolutionary traffic light adaptation",
consultada el 6 de Enero del 2009. ProModel Corporation, User´s Guide, U.S.A., 1999. Sasaki M. y T. Nagatani, "Transition and saturation of traffic flow controlled by traffic lights", http://www.sciencedirect.com/science?_ob=ArticleURL&_udi=B6TVG-4891NS5-2&_user=10&_rdoc=1&_fmt=&_orig=search&_sort=d&view=c&_acct=C000050221&_version=1&_urlVersion=0&_userid=10&md5=5966b12b8dec9f3ed30091bd29337bfe,
el 28 de Diciembre del 2008. Warberg, A., "Intelligent Traffic Light Management: Arterial Simulation & Optimization", http://www.man.dtu.dk/English/Research/Orbit_IPL.aspx?lg=showcommon&id=224465, consultada el 25 de Diciembre del 2008. Wahle, J., L. Neubert, J. Esser y M. Schreckenberg, "A cellular automaton traffic flow model for online simulation of traffic", http://www.sciencedirect.com/science?_ob=ArticleURL&_udi=B6V12-42RDN10-C&_user=10&_rdoc=1&_fmt=&_orig=search&_sort=d&view=c&_acct=C000050221&_version=1&_urlVersion=0&_userid=10&md5=4750bd97fa9e2219c6be9826e70203ef,
el 4 de Enero del 2009. Wiering, M., "Intelligent traffic Light control", http://www.ercim.org/publication/Ercim_News/enw53/wiering.html, consultada el 28 de Diciembre del 2008. Wiering, M., J. Vreeken, J. Van Veenen y A. Koopman, "Simulation and optimization of traffic in a city", http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?isnumber=29469&arnumber=1336426&count=171&index=81, consultada el 30 de Diciembre del 2008.
Source: http://www.ito-depi.edu.mx/Evidencias_MII/2)Estructura_y_personal_academico/Crit4_LGAC/4.2.1%20ProductosdeLGAC/Publicaciones.SAD/SAD09A-02-YA.pdf
metasystem.ba
High Performance Alarm Release 02 Congratulations on your choice of a MetaSystem product! We would like to ask you to read the instructions in this manual carefully as you will find it contains useful information to get acquainted with the many possibilities that the H.P.A (High Performance Alarm) range of products is able to offer. After you have installed the product according to the "installation instructions" supplied with the product, and which
transweb.ortransweb.org
YOUR NEW MEDICINES Your doctors have started you on many new medicines. These medicines are needed to make sure your transplant is successful. The medicines can be put into three different classes:• Anti-rejection – Help prevent your immune system from recognizing your new lung as foreign • Anti-infective – Help protect you against certain infections• Miscellaneous – Medicines that treat the side effects of the